
https://www.360cities.net/image/mars-panorama-curiosity-night










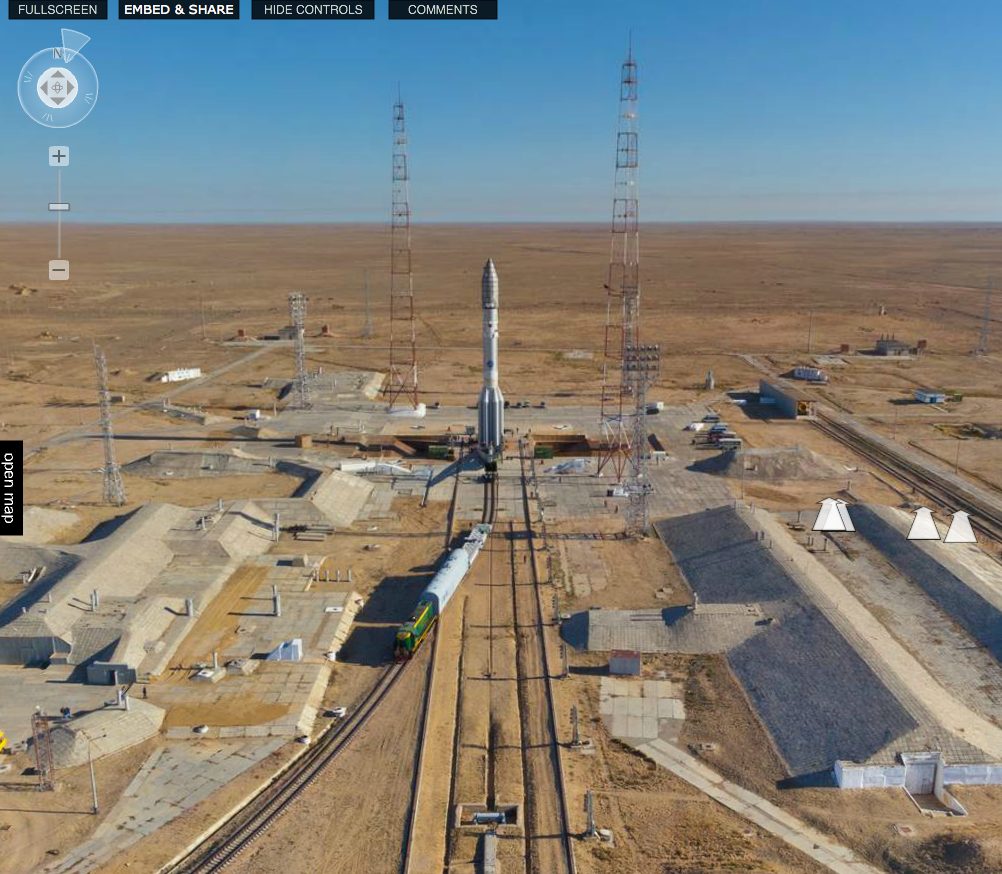
http://www.360cities.net/image/carrier-rocket-proton-m-transportation-to-the-launch-pad-baikonur
http://www.360cities.net/image/rocket-proton-m-transportation-to-the-launch-pad-baikonur
http://www.360cities.net/image/rocket-proton-transportation-to-the-launch-pad-baikonur
http://www.360cities.net/image/proton-m-transportation-to-the-launch-pad-baikonur
http://www.360cities.net/image/verticalization-of-proton-baikonur
http://www.360cities.net/image/carrier-rocket-proton-m-on-the-launch-pad
http://www.360cities.net/image/proton-m-on-the-launch-pad-baikonur
http://www.360cities.net/image/baikonur-pad-81-launcher-24(very impressive view)









http://www.360cities.net/image/crew-of-3334-long-expedition-to-the-iss-arrived-to-baikonur
http://www.360cities.net/image/crew-of-3334-long-expedition-to-the-iss-arrived-to-baikonur-2
http://www.360cities.net/image/crews-have-raised-flags-baikonur
http://www.360cities.net/image/crews-have-raised-flags-baikonur-2
http://www.360cities.net/image/gagarin-gazebo#1.53,21.49,28.3
http://www.360cities.net/image/interview-members-of-34-expedition-to-iss
http://www.360cities.net/image/in-front-of-monument-to-yuri-gagarin
http://www.360cities.net/image/lay-flowers-at-the-monument-to-sergei-korolev
http://www.360cities.net/image/cosmonauts-and-children


http://www.360cities.net/image/mars-panorama-curiosity-solar-day-177#-71.41,56.26,31.1
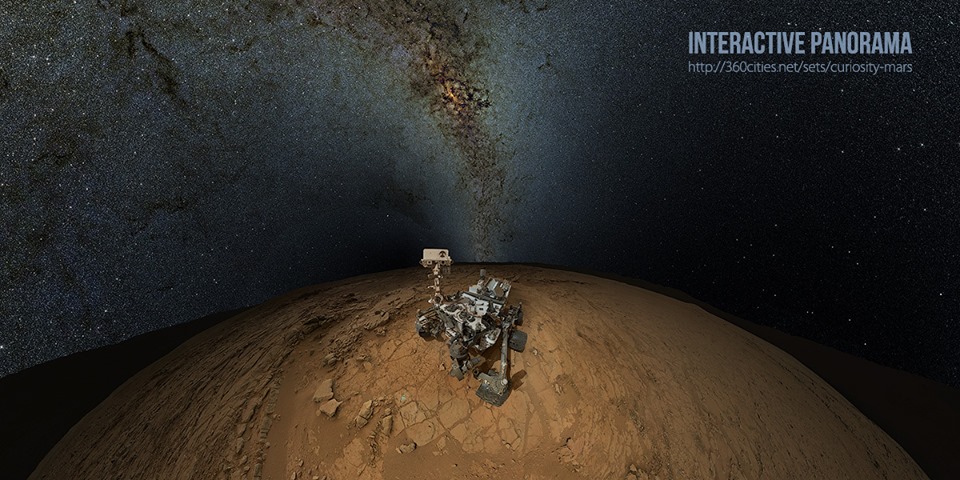
“This self-portrait of NASA’s Mars rover Curiosity combines 66 exposures taken by the rover’s
Mars Hand Lens Imager (MAHLI) during the 177th Martian day, or sol, of Curiosity’s work on
Mars (Feb. 3, 2013).
At the bottom of this panorama is the hole drilled in a rock. The drilling took place on Feb. 8,
2013, or Sol 182, Curiosity’s 182nd Martian day of operations. The sample-collection hole is 0.63
inch (1.6 centimeters) in diameter and 2.5 inches (6.4 centimeters) deep. The “mini drill” test
hole near it is the same diameter, with a depth of 0.8 inch (2 centimeters).
The images for full panorama obtained by the rover’s 34-millimeter Mast Camera. The mosaic,
which stretches about 30,000 pixels width, includes 113 images taken on Sol 170 and an
additional 17 images taken on Sol 176.”





Explanation: This remarkable self-portrait of NASA’s Mars Curiosity Rover includes a sweeping panoramic view of its current location in the Yellowknife Bay region of the Red Planet’s Gale Crater. The rover’s flat, rocky perch, known as “John Klein”, served as the site for Curiosity’s first rock drilling activity. At the foot of the proud looking rover, a shallow drill test hole and a sample collection hole are 1.6 centimeters in diameter. The impressive mosaic was constructed using frames from the rover’s Mars Hand Lens Imager (MAHLI) and Mastcam. Used to take in the panoramic landscape frames, the Mastcam is standing high above the rover’s deck. But MAHLI, intended for close-up work, is mounted at the end of the rover’s robotic arm. The MAHLI frames used to create Curiosity’s self-portrait exclude sections that show the arm itself and so MAHLI and the robotic arm are not seen. Check out this spectacular interactive version of Curiosity’s self-portrait panorama.
